Here is the specification of Robotic Hand Changer (model SWR)
with Optional Check Valve at Air Joint Part
-
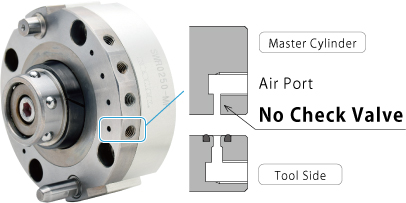
Air Joint Part 【Standard Model】 -
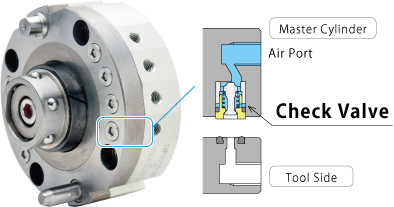
Air Joint Part 【Check Valve Option】
When using a pneumatic double-acting hand/actuator for the robot tool side, 3-position closed center solenoid valve is recommended for SWR with standard air joint. This is because the air port of SWR is always opened, so it is necessary to stop air release from the port when disconnected.
In case of the check valve option (SWR-S), metal sealing with built-in check valve blocks air when disconnected, so that it can be easily controlled by 2-position solenoid valve. (※ Please consider instructions in case of abnormality such as blackout and air shut-off.)
- For Air Joint Part 【Standard Model】
Recommended Air Solenoid Valve
3-Position 5-Port Closed Center (All-Port Block) - For Air Joint Part 【Check Valve Option】
2-Position Air Solenoid Valve can be used.
(ex.) 2-Position 5-Port Double Solenoid
※ Consider safety of the tool side when selecting.
※ For the use of a suction hand with negative pressure, the standard model is recommended because it has larger passage area than the check valve option.
Negative pressure can cause a check valve clogged with contaminants leading to reduction of the suctioning speed and force.
When passage area is yet insufficient, connecting with multiple air ports can increase passage area and suctioning speed.