
Task:Robot Sharing in a Labo
Robots used in a labo experiment for component development and a research at university need multi kinds of robotic hands, but it takes labor to attach and detach robotic hands every time they change a subject.
With robotic hand changer, you can attach and detach robotic hands just by turning air pressure ON and OFF.
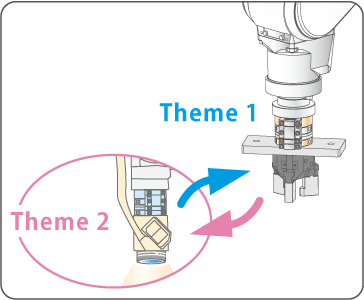
With high locating repeatability, re-teaching after hand change is not required. This enables robot sharing among themes, researchers and students and to start a theme just after hand change.